Senior Software Engineer, Robotics & Physical AI Integration
Goddard • Wilmington, MA1d • Onsite
10,000 jobs found — updated daily
We are looking for a Senior Software Engineer to own the integration layer between our AI/ML models and the physical systems they control. This is not a role for someone who writes glue code and calls it done. You will be expected to own the full stack from industrial fieldbus communication and real-time control loops up through the software interfaces that put trained models to work in the real world. You will work directly with our Machine Learning Engineer to define inference contracts and latency budgets, and with our hardware and mechanical teams to understand what the physical system can and cannot tolerate. If you have strong opinions about how software should behave when it controls hardware that moves, and you debug problems that span firmware, operating systems, and silicon without losing patience, you will thrive here.
Stand Out From the Crowd
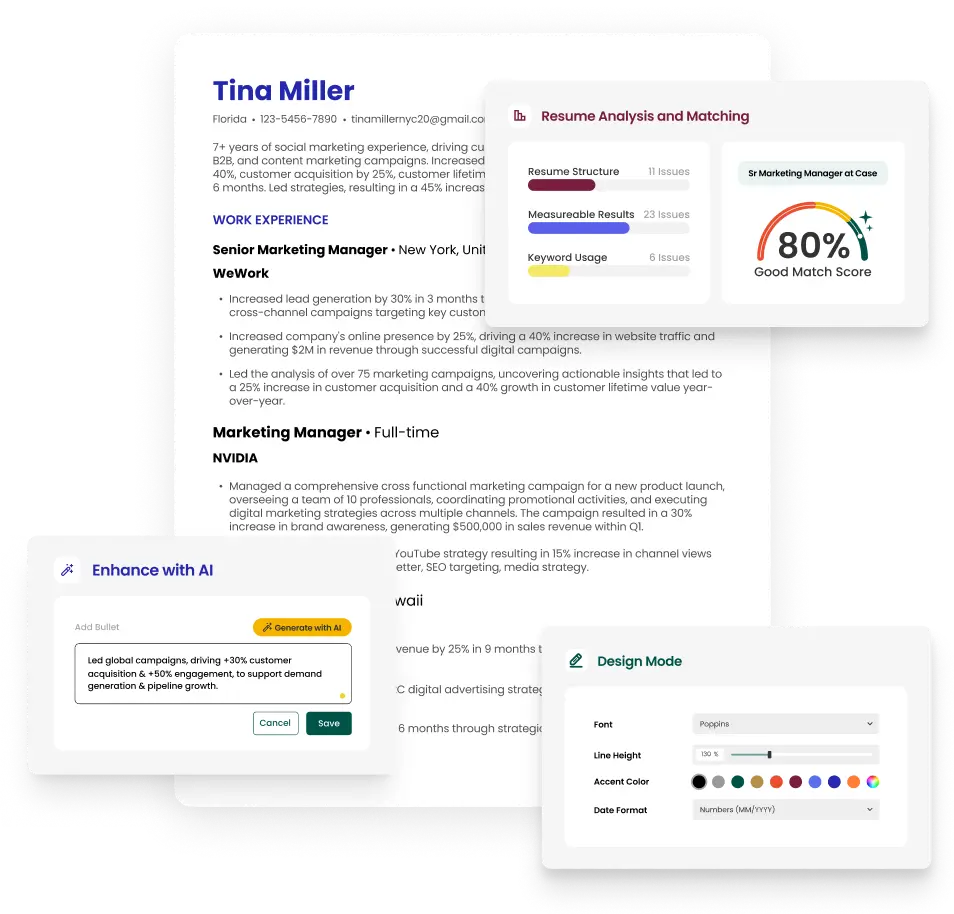
Upload your resume and get instant feedback on how well it matches this job.
Job Type
Full-time
Career Level
Senior
The resume builder that gets results.
